With technological advancements in artificial intelligence (AI) and the resulting
prevalent po- sition of this topic outside of academia, the demand to present
their work to a broad audience has increased in institutions conducting research
in AI. For example, students at the Centre of Artificial Intelligence (CAI) at the
Zurich University of Applied Sciences (ZHAW) developed an AI demonstrator using a
Unitree A1 quadrupedal robot to recognize hand gestures and perform corresponding
actions. The Bachelor’s thesis at hand integrates this existing gesture recognition
into a modular control system based on the Robot Operating System (ROS) and visualizes
the main algorithms with a graphical user interface (GUI) and the ROS tool RViz.
The robot is equipped with an external ZED2 stereo camera and an Ouster OS1 light
detection and ranging (LiDAR) sensor, improving the robot’s environmental perception
to localize itself and avoid collisions. Moreover, a Kalman filter fuses stereo camera
data and inertial measurements, com- bining relative and absolute state estimations.
A LiDAR-based map generated by a simultaneous localization and mapping (SLAM)
algorithm corrects this sensor-fusion-based state estimation. The software modules
that provide this functionality to achieve the aforementioned research goals were
implemented in C++ and Python, employing the corresponding ROS libraries. The
developed position controller enables the robot to move on a path with a maximal
deviation of 0.2 m when walking on a 2 m straight line. During this motion, the
collision avoidance system reliably prevents collisions caused by the robot.
Furthermore, the robot is already successfully used for live demonstrations at
public events to enhance the understanding of AI. The designed software platform
integrates ROS-based position control and collision avoidance and provides a modular
base for future projects on the utilized robotic platform.
· In collaboration with Daniel Schweizer and under the supervision of Prof. Dr. Thilo
Stadelmann and Pascal Sager.
The demand for sustainable solutions is increasing in various economic sectors and has
also found its way into the construction industry. Whereas customary structural designs
are optimized in terms of simplicity, progressive materials such as Carbon Prestressed
Concrete (CPC) provide mass reduction given equal properties in terms of static resilience
due to sophisticated geometrical arrangements and hence, reduce the carbon footprint of
constructions. However, the reduction of material also has negative effects on acoustic
performance which has therefore to be investigated. This is where multiphysics simulation
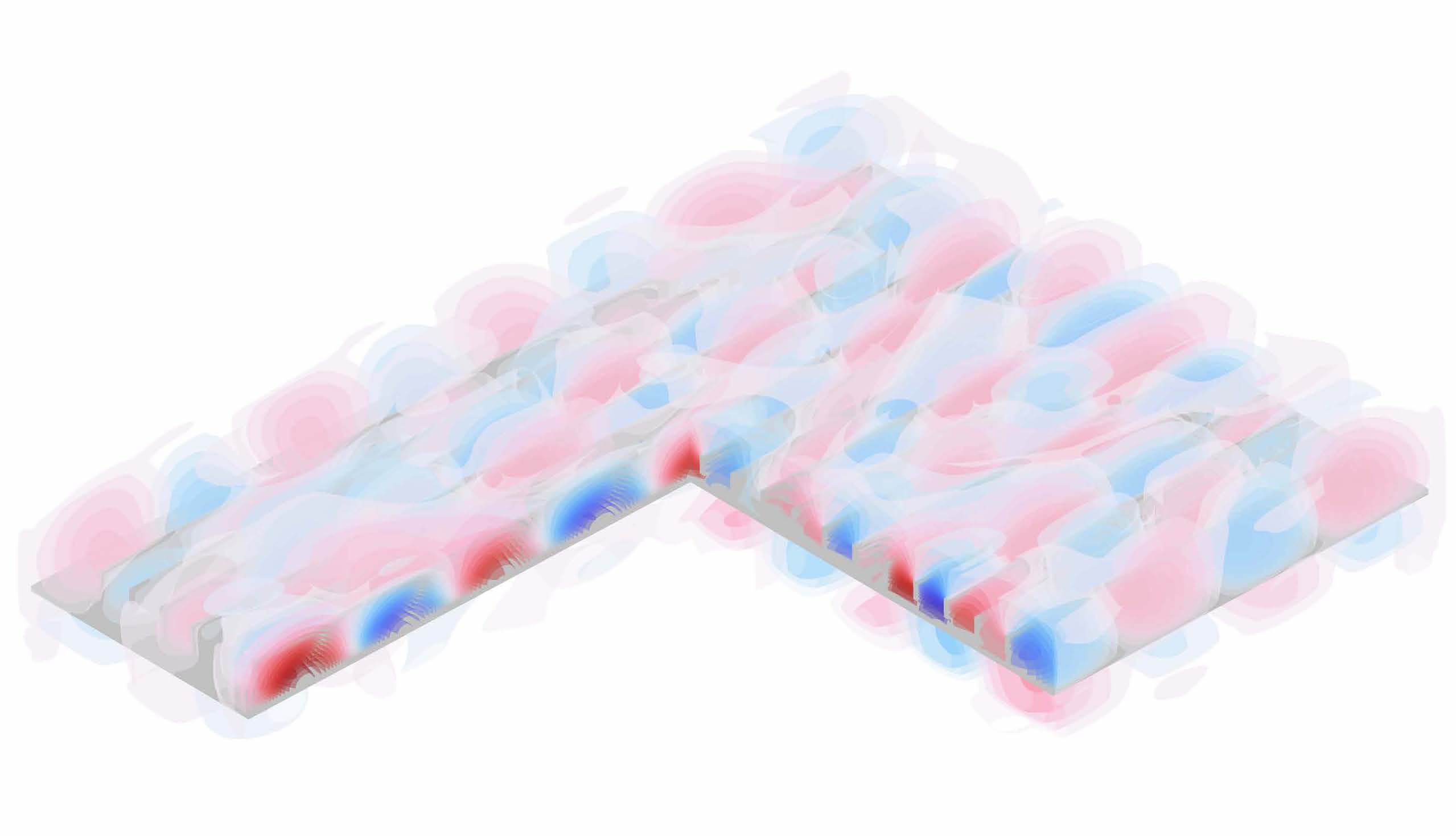
tools open up new opportunities. In this project, two- and three-dimensional CPC geometries
are investigated in terms of their sound transmission properties using finite element analysis
(FEA). Various two-dimensional section views as well as a three-dimensional CPC structure were
modeled and evaluated by their sound transmission properties over a frequency range from 1 Hz to
at least 720 Hz. The resulting sound transmission loss (STL) curve shows that the CPC structure
has, depending on the frequency observed, up to 57 dB lower damping properties in terms of
acoustic power than a regular concrete plate with equal outer dimension. The difference between
the two geometries is noticeably higher at frequencies lower than the first mechanical
eigenfrequency whereas at higher frequencies, the CPC structure performs better than at lower
ones. The tool developed in this study provides a reliable base for further simulations, where
the geometrical parameters can be optimized. From these results, the measurements of acoustic p
erformance of building structures can be predicted without experimental testing.
· In collaboration with Daniel Schweizer and under the supervision of Prof. Dr. Andreas Witzig
and Dr. Mathias Weyland.